No primeiro vídeo aparece o robô tentando um pequeno salto. É estranho ver como o robô parece estar inseguro. 🙂 Parece como uma pessoa que salta em um local escorregadio.


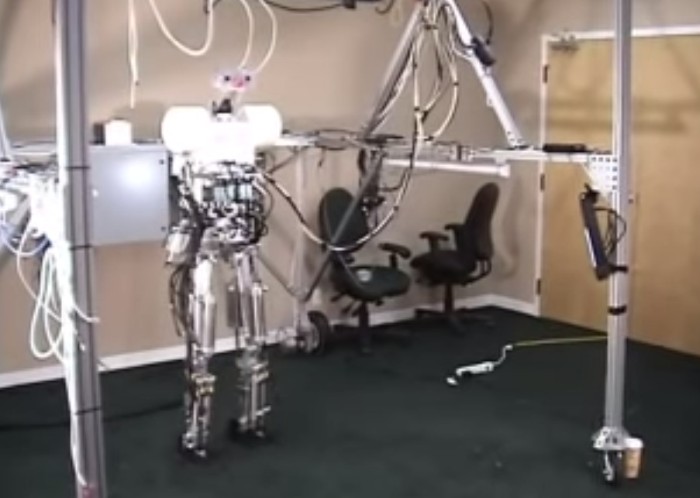
Neste segundo vídeo ele aprende a andar.

Os sistemas ativamente corrigem as imperfeições e tentam manter o equilíbrio da máquina, sempre corrigindo a postura quando a posição do corpo é alterada.
O robô foi apelidado de Dexter e é uma criação de Trevor Blackwell.
Para maiores informações visite o site dos pesquisadores.
http://anybots.com/